Theoretical Paper
- Computer Organization
- Data Structure
- Digital Electronics
- Object Oriented Programming
- Discrete Mathematics
- Graph Theory
- Operating Systems
- Software Engineering
- Computer Graphics
- Database Management System
- Operation Research
- Computer Networking
- Image Processing
- Internet Technologies
- Micro Processor
- E-Commerce & ERP
Practical Paper
Industrial Training

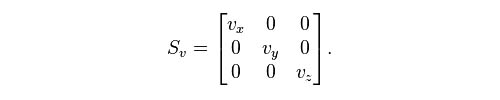
Scaling, Matrix Representation
A scaling can be represented by a scaling matrix. To scale an object by a vector v = (vx, vy, vz), each point p = (px, py, pz) would need to be multiplied with this scaling matrix:
As shown below, the multiplication will give the expected result:
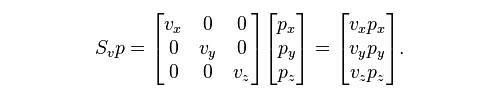
Such a scaling changes the diameter of an object by a factor between the scale factors, the area by a factor between the smallest and the largest product of two scale factors, and the volume by the product of all three.
The scaling is uniform if and only if the scaling factors are equal (vx = vy = vz). If all except one of the scale factors are equal to 1, we have directional scaling.
In the case where vx = vy = vz = k, the scaling is also called an enlargement or dilation by a factor k, increasing the area by a factor of k2 and the volume by a factor of k3.
A scaling in the most general sense is any affine transformation with a diagonalizable matrix. It includes the case that the three directions of scaling are not perpendicular. It includes also the case that one or more scale factors are equal to zero (projection), and the case of one or more negative scale factors. The latter corresponds to a combination of scaling proper and a kind of reflection: along lines in a particular direction we take the reflection in the point of intersection with a plane that need not be perpendicular; therefore it is more general than ordinary reflection in the plane.